
Die mit ** gekennzeichnete Links auf dieser Seite sind Affiliatelinks. Als Amazon-Partner verdiene ich an qualifizierten Verkäufen.
Beim Kauf meines Anet A8 war schon ein Autolevel Sensor LJ18A3-8-Z/BY verbaut. Hierbei handelt es sich um einen sogenannten PNP Sensor. Diese Art von Sensor muss in der Firmware speziell angepasst werden. Standardmäßig ist die Marlin Firmware für einen NPN Sensor vorkonfiguriert. Die spezielle Konfiguration beschreibe ich weiter unten genauer.
Für die gesamte Optimierung meines Autolevel Sensors habe ich folgende Teile ausgedruckt bzw. gekauft:
- Anet A8 Autolevel Sensor Platte (Schreibt mir eine Nachricht wenn Ihr die Druckdatei benötigt)
- 3 Stück M3x16mm Schrauben
- Kleine Metallplatte
- 1x 4N35 Optokoppler ==> http://amzn.to/2j2lNaB **
- 1x 1k Ohm Widerstand ==> http://amzn.to/2nfnLZF **
- 1x 10k Ohm Widerstand ==> http://amzn.to/2k9MYDK **
- 1x Lochrasterplatine ==> http://amzn.to/2j21o5D **
Nachdem ich die damals vorinstallierte Skynet 3D Firmware durch eine aktuelle Marlin ausgetauscht hatte, ist mir mein Z-Achse direkt mal an die Begrenzung gefahren und hat nicht automatisch gestoppt. Wie sich dann herausstellte wurde für die Z-Achse kein Endschalter montiert. Aus diesem Grund habe ich mir hierfür eine kleine Grundplatte ausgedruckt und diese mit einer kleinen Metallplatte versehen.
Der Umbau bzw. Anbau der Autolevel Sensor Platte war sehr einfach.

- Die Platte wurde mit 2 Stück M3x16mm Schrauben direkt an der Motorenplatte befestigt.
- Die kleine Metallplatte wurde mit 1 Stück M3x16mm Senkkopfschraube gesichert.
- Die Platte selbst sieht aktuell nicht wirklich schön aus, funktioniert aber. Zum Zeitpunkt diese Ausdrucks hat der Drucker noch nicht wirklich gut gedruckt.
Die elektrische Anbindung des Sensors wurde vom Vorbesitzer mit div. Widerständen gemacht. Dies Art der Anbindung hat aber den Nachteil, dass immer etwas Spannung an Eingang des Mainboards anliegt. Daher kann es vorkommen, dass der Drucker den 0 Punkt des Sensors nicht immer sauber erkennt. Leider kam es trotz meiner neuen Sensorplatte vor, dass das Ende der Z-Achse nicht erkannt wurde. Der Autolevel Sensor selbst hatte die Metallplatte sauber erkannt, dies war durch das Aufleuchten der roten LED zu sehen. Aus diesem Grund habe ich die Ansteuerung des Autolevel Sensors jetzt über einen Optokoppler gelöst.
Hier ist der Schaltplan für den Optokoppler
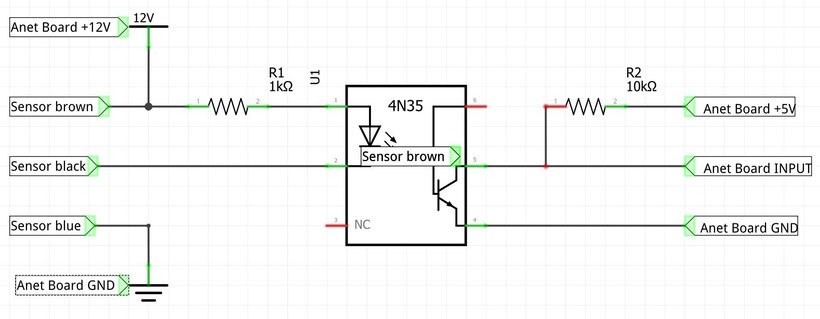

Die Belegung des Anschlusses ist wie folgt von rechts nach links
- Steckerposition Rechts (Außenseite) = SIG/INPUT
- Steckerposition Mitte = 5V
- Steckerposition Links (Innenseite) = GND/0V

Die Belegund des Anschlusses ist wie folgt von rechts nach links
- Steckerposition Rechts = GND
- Steckerposition Links = +12V
Ein Bild von der fertigen Platine kommt sobald ich diese komplett (mit Befestigung) fertiggestellt habe.
Damit der Autolevel Sensor mit der Marlin Firmware sauber funktioniert, muss in diese ein paar Zeilen angepasst werden.
Folgende Parameter müssen in der "Configuration.h" angepasst werden
#define Z_MIN_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop.
Dieser Parameter muss von "true" auf "false" gesetzt werden. Da mein Autolevel Sensor einen PNP ist, arbeitet dieser im Vergleich zu einem NPN genau andersrum.
#define X_PROBE_OFFSET_FROM_EXTRUDER -26 // X offset: -left +right [of the nozzle]
#define Y_PROBE_OFFSET_FROM_EXTRUDER -40 // Y offset: -front +behind [the nozzle]
#define Z_PROBE_OFFSET_FROM_EXTRUDER 15 // Z offset: -below +above [the nozzle]
Diese Parameter sind in der Regel schon so gesetzt. Bei mir musste ich den Wert "#define Y_PROBE_OFFSET_FROM_EXTRUDER" von -33 auf -40 anpassen.
//#define AUTO_BED_LEVELING_3POINT
#define AUTO_BED_LEVELING_LINEAR
//#define AUTO_BED_LEVELING_BILINEAR
//#define AUTO_BED_LEVELING_UBL
//#define MESH_BED_LEVELING
Da ich eine Glasplatte verwende benutze ich den Parameter "#define AUTO_BED_LEVELING_LINEAR"
**
Kommentar schreiben